中央大学として初の大学発ベンチャーであるソラリスは、生物や生体の機構(バイオメカトロニクス)を模した「柔らかいロボット」に注力し、軽量で高出力の空気圧人工筋肉や、ぜん動運動ポンプなどの独自技術で実用的な成果を出している。
【本技術の概要】
産業用ロボットに代表されるような従来型のロボットは、高速で正確な位置制御を優先させるため「固く」「頑丈」である必要があった。一方、人間を含めた生物は、軽くて柔らかい構造を持ち、数万年をかけてそれぞれの環境に適応するように独自の進化を遂げてきた。
ソラリスは、このような生物や生体の機能を活用した柔らかいロボット(ソフトロボット)などの研究開発成果を発表している。たとえば、人間の筋肉を模した「軸方向繊維強化型人工筋肉」や、大腸で行われているぜん動運動を手本として製造現場で取り扱われている粉体や高粘性流体、固液混合流体などを低圧力・低せん断力により、搬送・混合が可能な「大腸型ぜん動ポンプ」を開発している。
【本技術の特徴】
ゴムの膨張に対して繊維を軸方向にのみ拘束し空気圧を供給すると、ゴムは軸方向には膨張しないで半径方向のみに膨張する。このとき、繊維は伸びないのでチューブの膨張分だけ軸方向に収縮力を得ることができる。この方法でチューブ全体に加えられた圧力を効率よくアクチュエータの収縮力として伝達している。
さらに、直径数μmのカーボンロービング繊維をゴムチューブ内に層状に内挿することで、拘束繊維と弾性媒体との磨耗が減少するとともに、ゴム部の膨張時における応力集中を避け、大きな圧力まで耐えることができる。
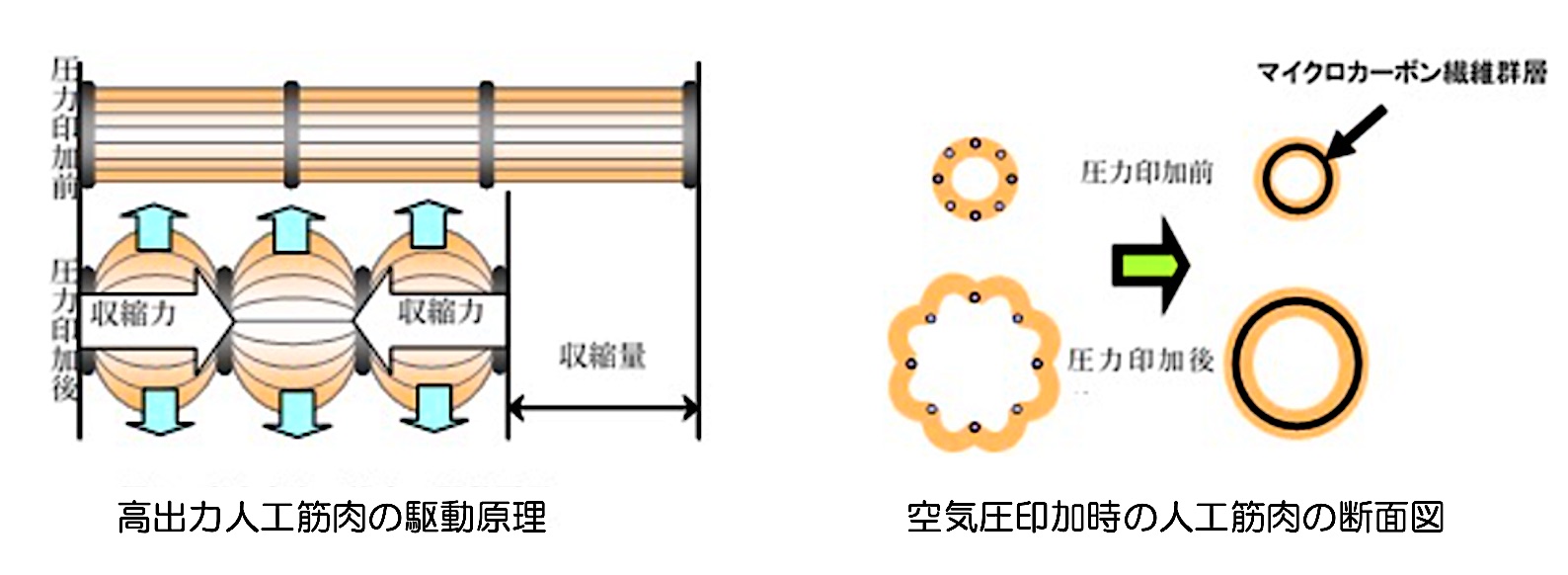
開発した人工筋肉の特性では、ゴムチューブに軸方向に揃えた補強繊維を配置しているため、加圧時に半径方向に膨張し、軸方向に収縮する。低圧駆動で最大38%以上収縮するなど、マッキベン型人工筋肉と比較して優れた特性を持つ。また、高収縮特性ではマッキベン型人工筋肉の4倍にあたる最大2,000Nを達成した。
① 軽量で出力密度が高い。
② 水中や粉中で使用可能であるなど、耐環境性に優れている。
③ 摺動部がなくスティックスリップが生じない。
④ 人間の筋特性と同様の柔軟性を持っている。
⑤ 材料費が安価である。消耗品として使用することが可能。
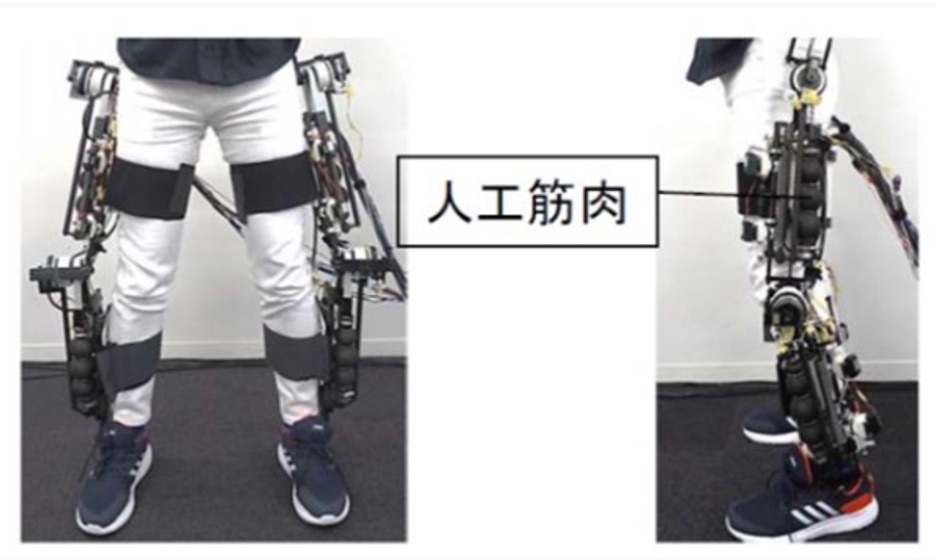

⑴ 装着型人工筋肉:下肢アシストロボットなど
⑵ ミミズロボット:曲がった管の中や、不整地、地中で活躍する
⑶ 大腸型ぜん動ポンプ:粘性の高い材料を混合し、かつ搬送する。
扱いが難しい固体ロケット燃料を、安全、効率的にかつ連続的に製造することができる。